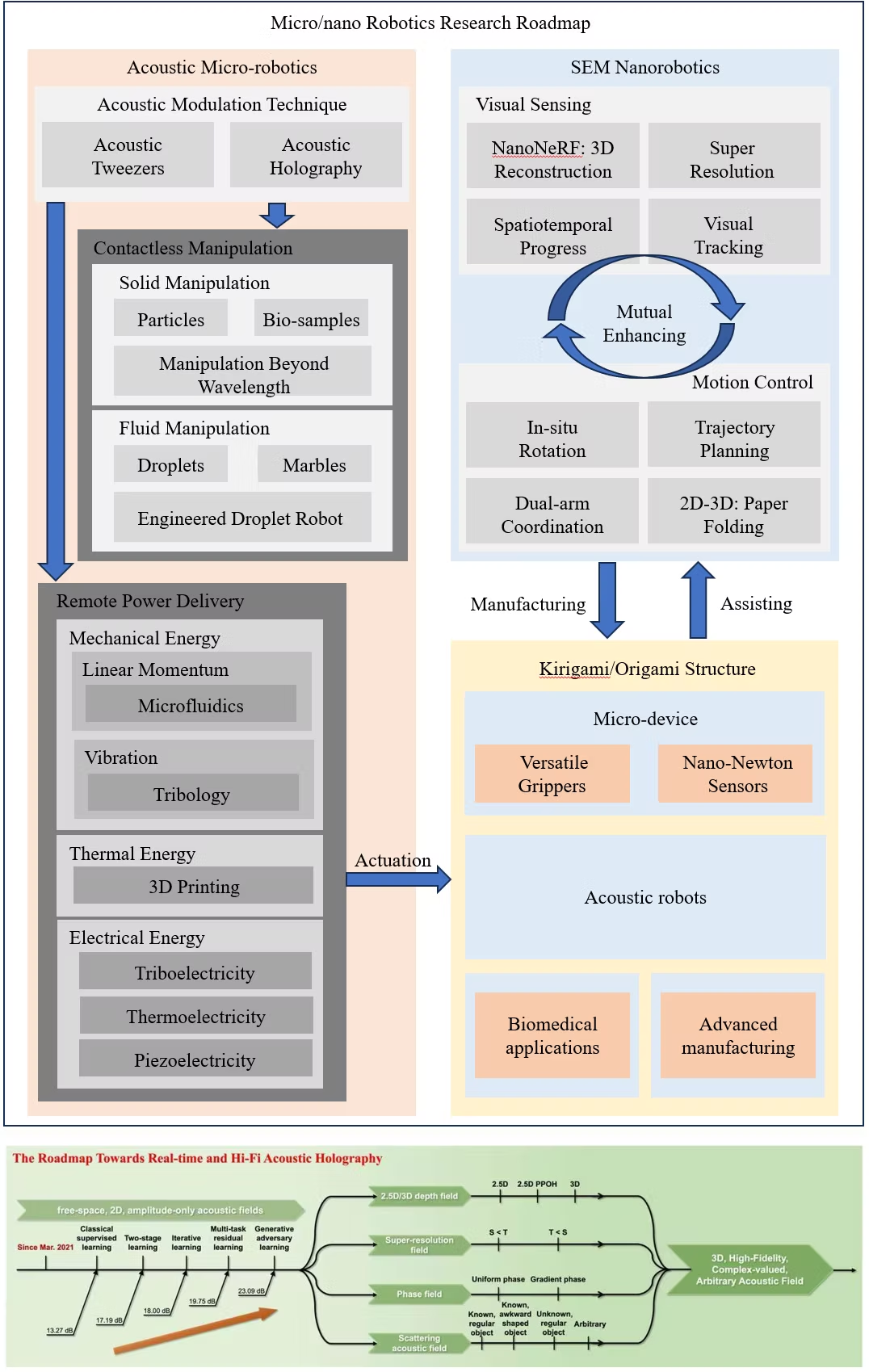
Micro-Nano Robotics
9 DoF Nanorobot System
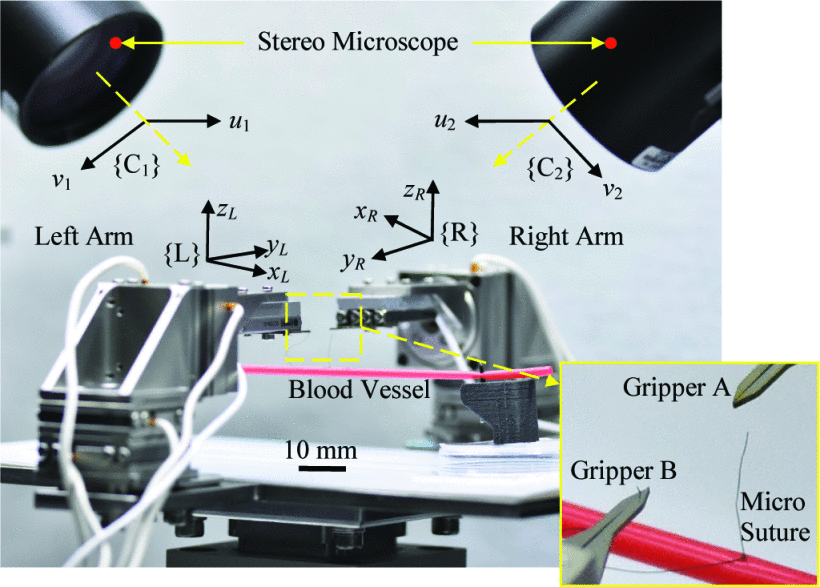
A novel dual-arm based knot-tying nanorobot setup is proposed, featured by a rotation DOF mounted on each arm, endowing the system with additional manipulation dexterity.
Biomedical Application of Nanorobot: Knot-Tying
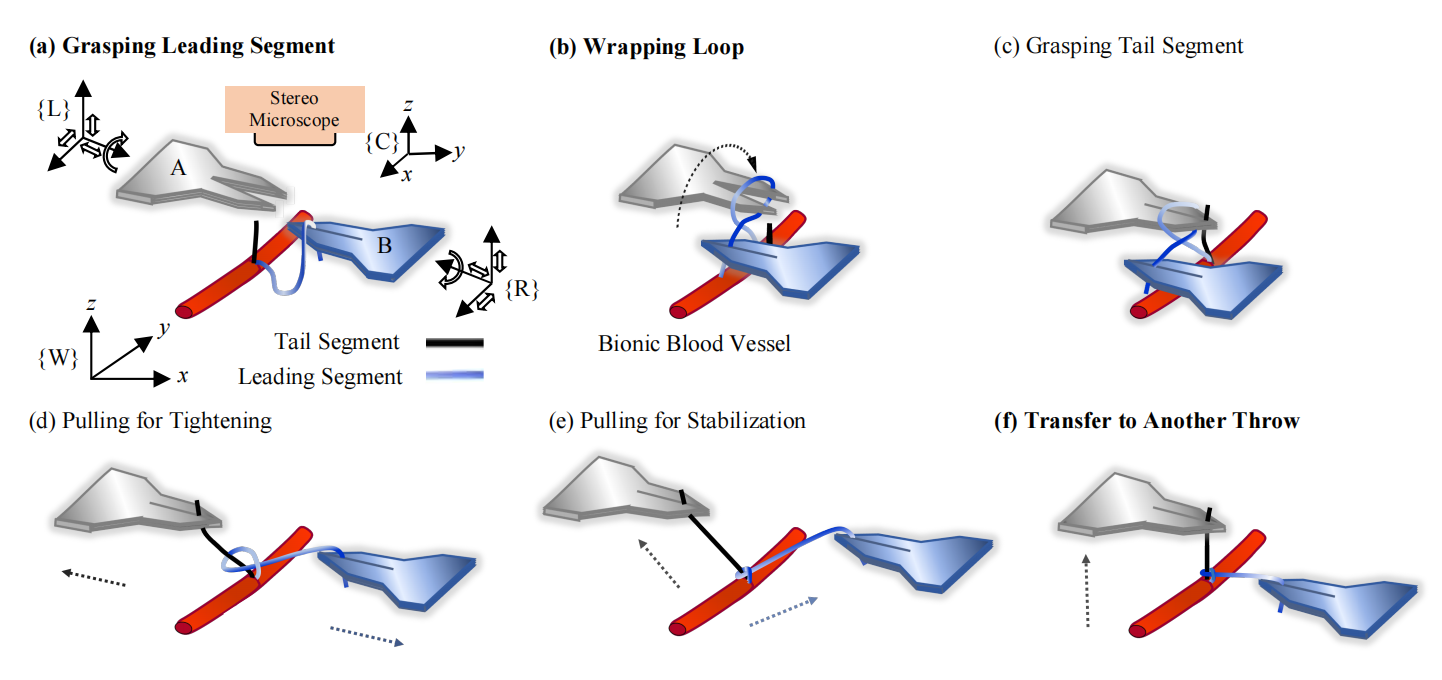
We propose a novel dual-arm nanorobotic system setup for automated knot tying performed on mini-incision under stereo microscope, featured by an additional rotation degree of freedom mounted on each arm.
With this setup, an optimized motion trajectory planning under standard knot-tying protocol is also presented in order to support tying knots with shorter and thinner suture. Leveraging the natural advantage of nanorobotics and microscope, the proposed system is capable of tying consecutive throws with micro-suture on mini-incision, like in vascular anastomosis or microsurgery.
We successfully evaluated the knot tying system on 2.0 mm wide bionic blood vessel with 30 mm long #8-0 micro-suture. We finally tested the mechanical strength of the knots for potential medical assessment.
Biomedical Application of Nanorobot: Implantation of Flexible Neural Electrode for BCI
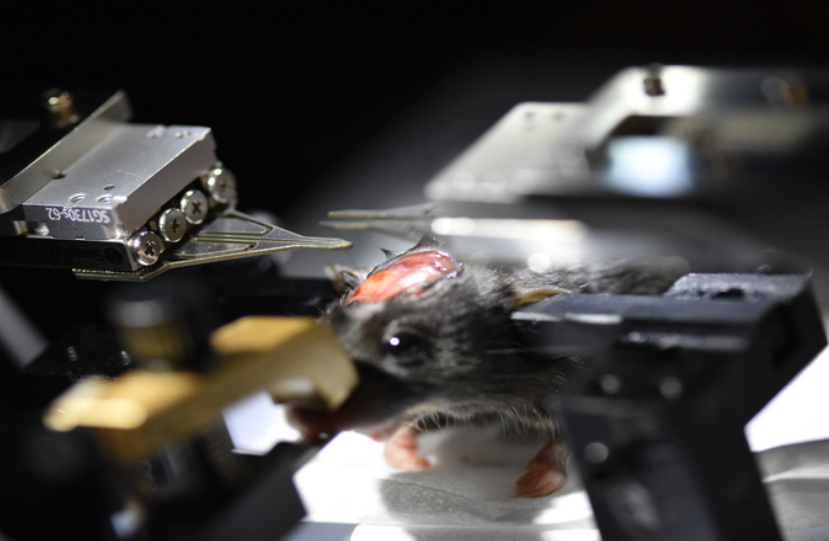
We proposes a novel nanorobot-based technique for direct implantation of flexible neural electrodes, leveraging the high controllability and repeatability of robotics to enhance the implantation quality.
This approach features a dual-arm nanorobotic system equipped with stereo microscope, by which a flexible electrode is first visually aligned to the target neural tissue to establish contact and thereafter implanted into brain with well controlled insertion direction and depth.
The key innovation is, through dual-arm coordination, the flexible electrode maintains straight along the implantation direction. With this approach, we implanted CNTf electrodes into cerebral cortex of mouse, and captured standard spiking neural signals.
Nanorobot Research Roadmap